概要
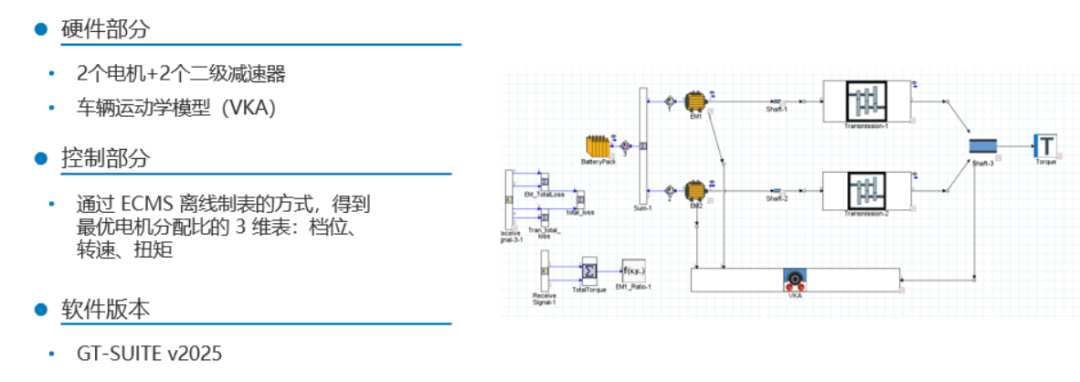
GT-SUITE的ECMS算法支持各类混动架构,如串并联、功率分流、增程、并联、多电机EV等等。本文将介绍ECMS的一种特殊应用,即离线地生成最优控制map。本文以一个EV车的动力架构为例,其包含两个电机和两个减速器。通过ECMS获得最佳电机分配比例。
1简介
随着车载控制器算力的持续提升以及高级驾驶辅助系统(ADAS)的广泛应用,多种先进的控制策略已逐步应用于量产车型的控制器中。其中特别以ECMS(等效“燃油”消耗最小化策略)和MPC(模型预测控制)为主要代表。ECMS 作为极小值原理(PMP)中协状态方程退化后的版本,从全局最优退化成了局部最优。虽然只是局部最优,但ECMS具有实时性强、相对简单的特点,在整车动力性经济性中应用较多。
目前ECMS在实车控制器的应用有两种方式。
在ECU中直接进行ECMS的计算。该种方式受限于ECU的算力,一般ECMS的控制扫略点的间隔会较大。
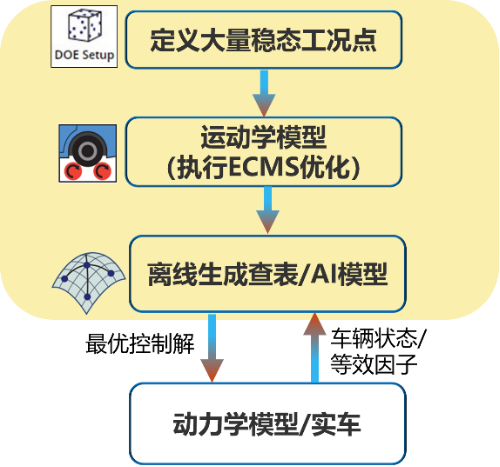
先离线制表,然后在ECU中查表。该种方式计算速度更快,但前期需要进行大量离线制表工作。
本文主要介绍第二种方式。其结构如下图所示。在这个EV架构中,电机的最优分配比是一张三维map:减速器输出端的扭矩、转速以及档位。
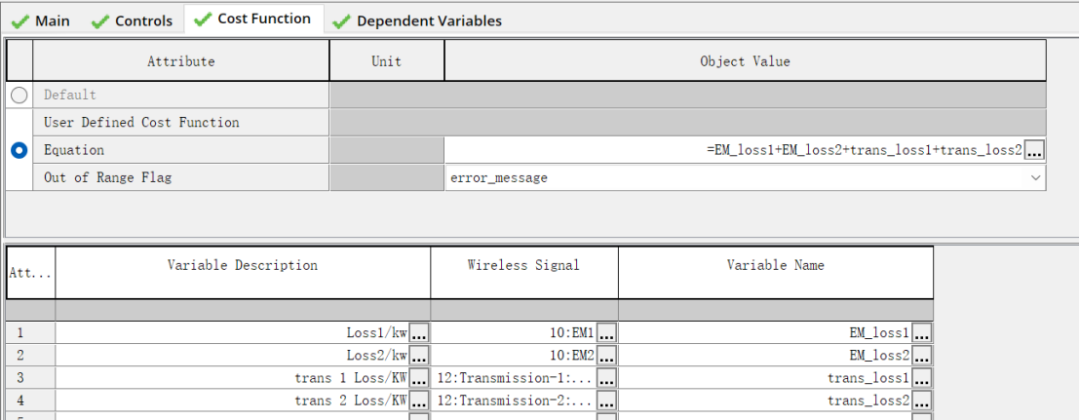
ECMS 将燃油/氢气/电能等多种能耗加权为一个等效能耗,进而实时求解这个局部最优问题。代价函数的定义至关重要,本文所用方程如下所示,即两个电机和两个减速器的总损耗。
2模型说明
3ECMS的设置
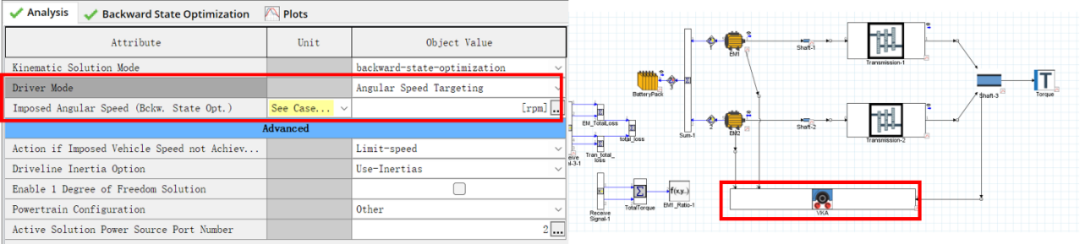
3.1运动学模板定义
如下图所示,在车辆运动学模板(VehKinemAnalysis)中,选择 Angular Speed Targeting 模式,可以指定减速器输出侧的转速[rpm],便于后续进行DoE。
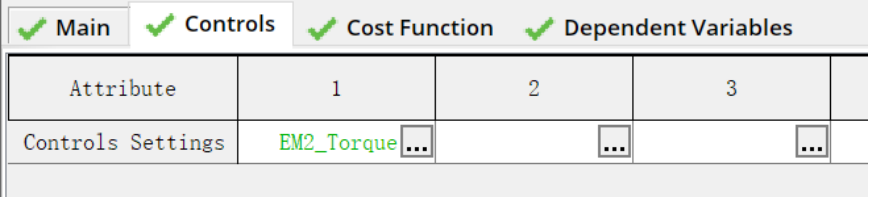
3.2ECMS 设置
将其中一个电机的扭矩输出作为控制变量。另一个电机的扭矩需求软件将自动根据总扭矩需求计算得到。
3.3代价函数定义
本文采用自定义的代价函数。
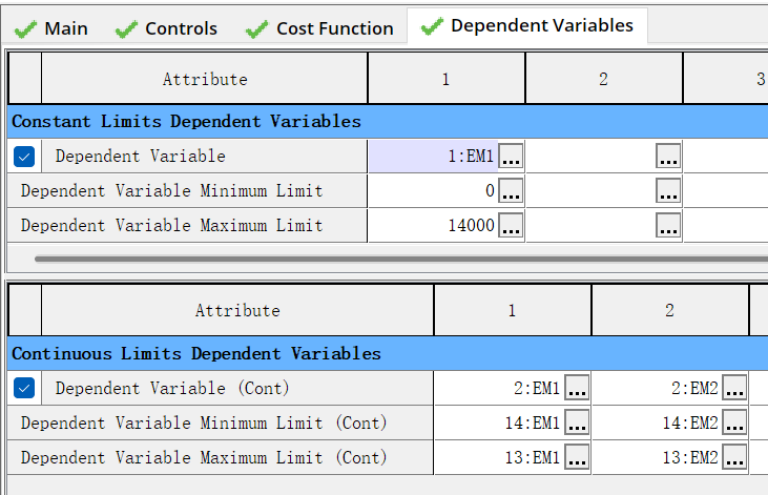
3.4约束定义
约束定义有两类:定常值约束和时变约束。定常值约束约束了电机转速,时变约束约束了电机的外特性。
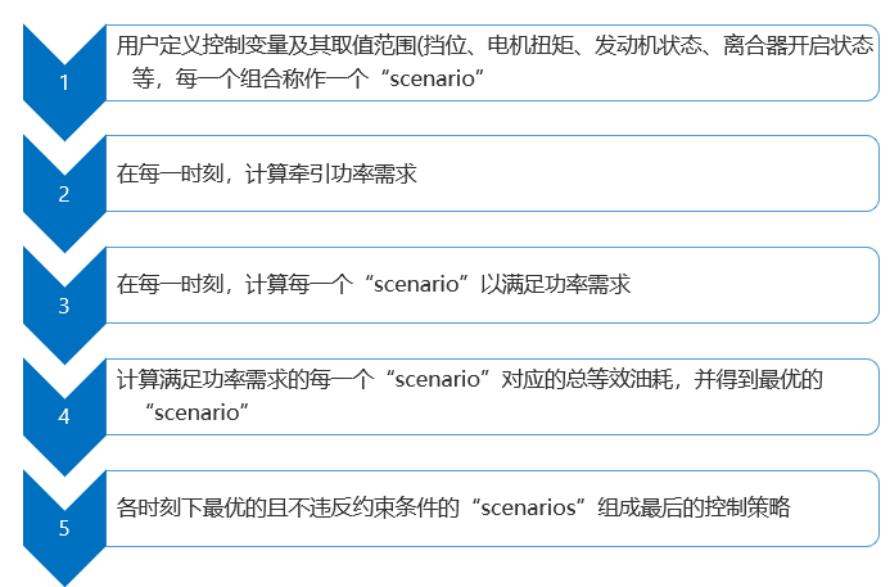
3.5ECMS的计算流程
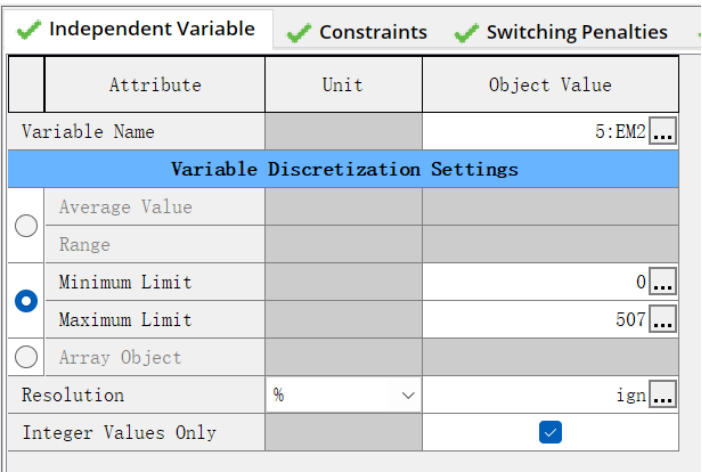
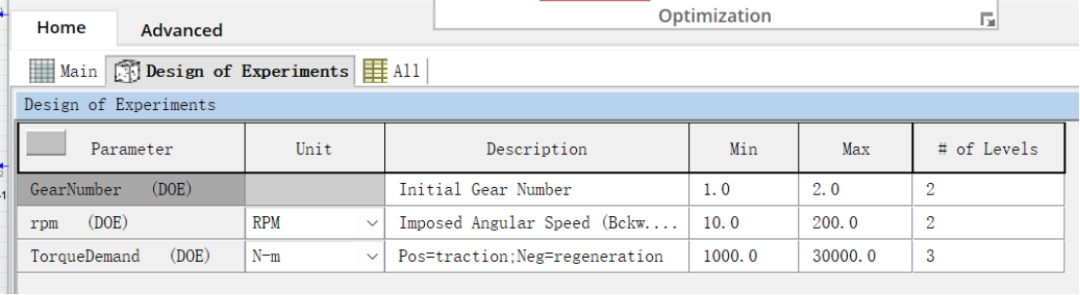
4DoE 设置
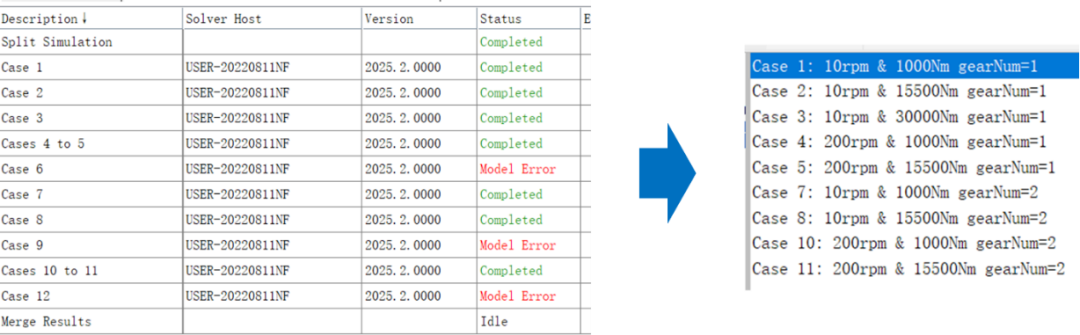
将减速器档位、减速器输出端转速和扭矩作为自变量,生成 DoE。本例故意将扭矩需求设置的很大(e.g. 30000Nm),以致超出电机外特性
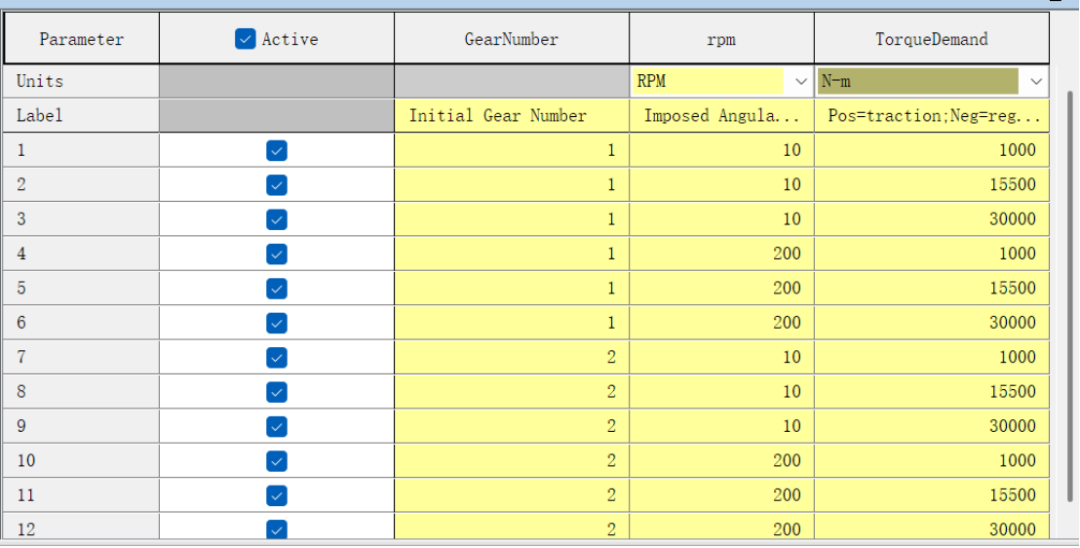
自动生成DoE
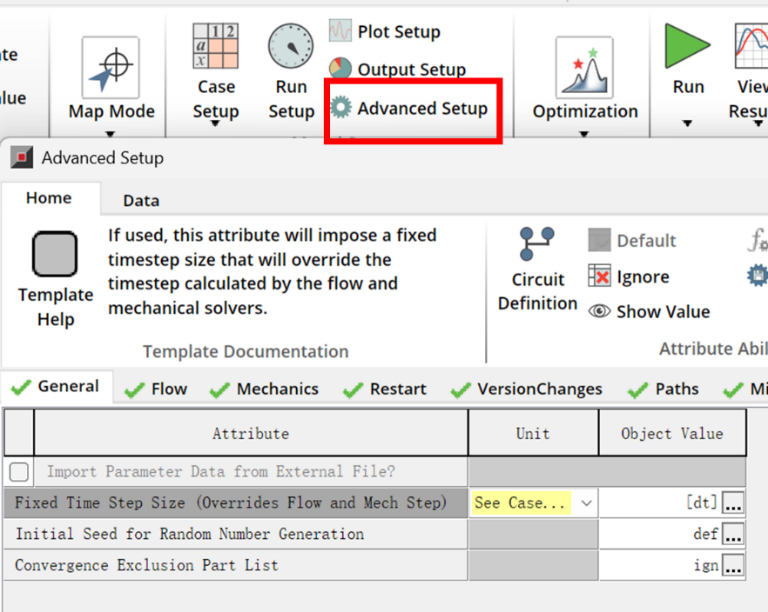
5 求解器设置
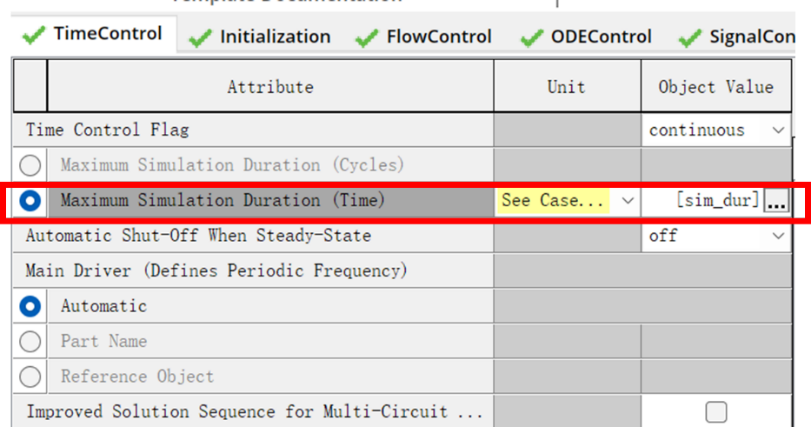
在高级设置中,设置固定时间步长 dt=0.1s。在 RunSetup中总计算时长为 0.2s 即可。
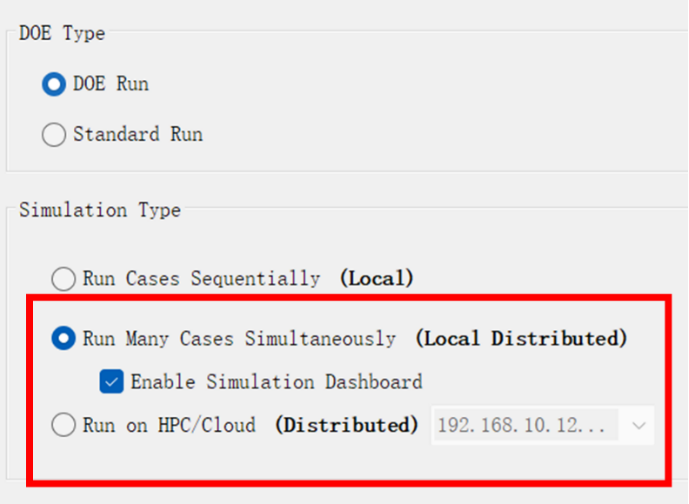
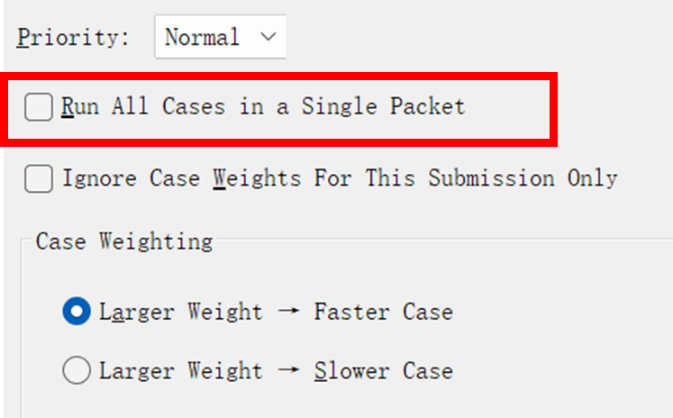
由于在DoE时,模型难以保证所有的取值(特别是扭矩需求)都能得到满足,故有些case 必然计算失败(比如超出了电机外特性)。若采用串行计算,则软件将在检测到失败的case时停止计算,故推荐采用并行计算(即使只有一个许可证),本例采用本地并行计算
GT 会自动跳过失败的case,并将未失败的case汇总
6计算结果
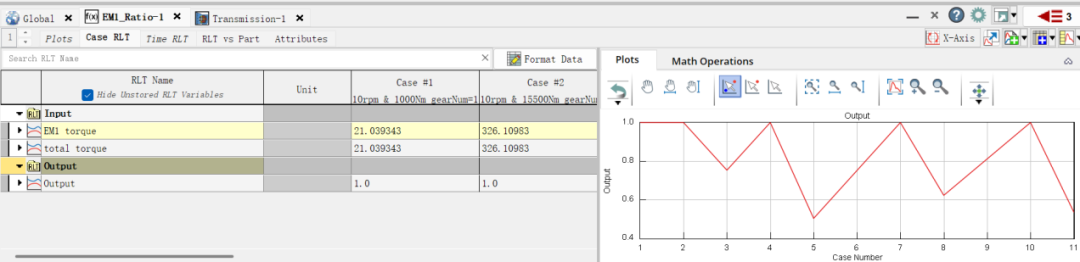
这类计算非常快,可以方便地查看、导出最佳电机分配比



 B站账号
B站账号

 知乎账号
知乎账号

 微信账号
微信账号